旋翼无人机氛围四旋翼、六旋翼、八旋翼、多旋翼等,多种旋翼无人机的飞行原理主要通过调节电机的转速来改变旋翼的升力,从而控制飞行器的姿态和位置。
四旋翼无人机是一种具有四个螺旋桨的飞行器,这四个螺旋桨通常呈十字形交叉结构,相对的螺旋桨具有相同的旋转方向,但分为两组,每组旋转方向相反。这种结构使得四旋翼无人机能够在六个自由度上进行控制,包括沿三个坐标轴的平移和旋转动作。通过调节每个电机的转速,可以实现对飞行器的垂直运动、俯仰运动、滚转运动和偏航运动的精确控制。
垂直运动是通过同时增加或减少四个电机的输出功率来改变旋翼的转速,从而调整总的升力,使飞行器实现上升、下降或保持悬停。
俯仰运动和滚转运动则是通过改变特定电机的转速,产生不平衡的升力,使飞行器绕特定轴旋转。
偏航运动则是通过调整对角线上的电机转速不同,产生不平衡的反扭矩,使飞行器绕垂直轴旋转。
这种通过电机转速调节来实现飞行器各种动作的方式,使得四旋翼无人机具有高度的灵活性和稳定性,广泛应用于航拍、监控、救援等多种领域。
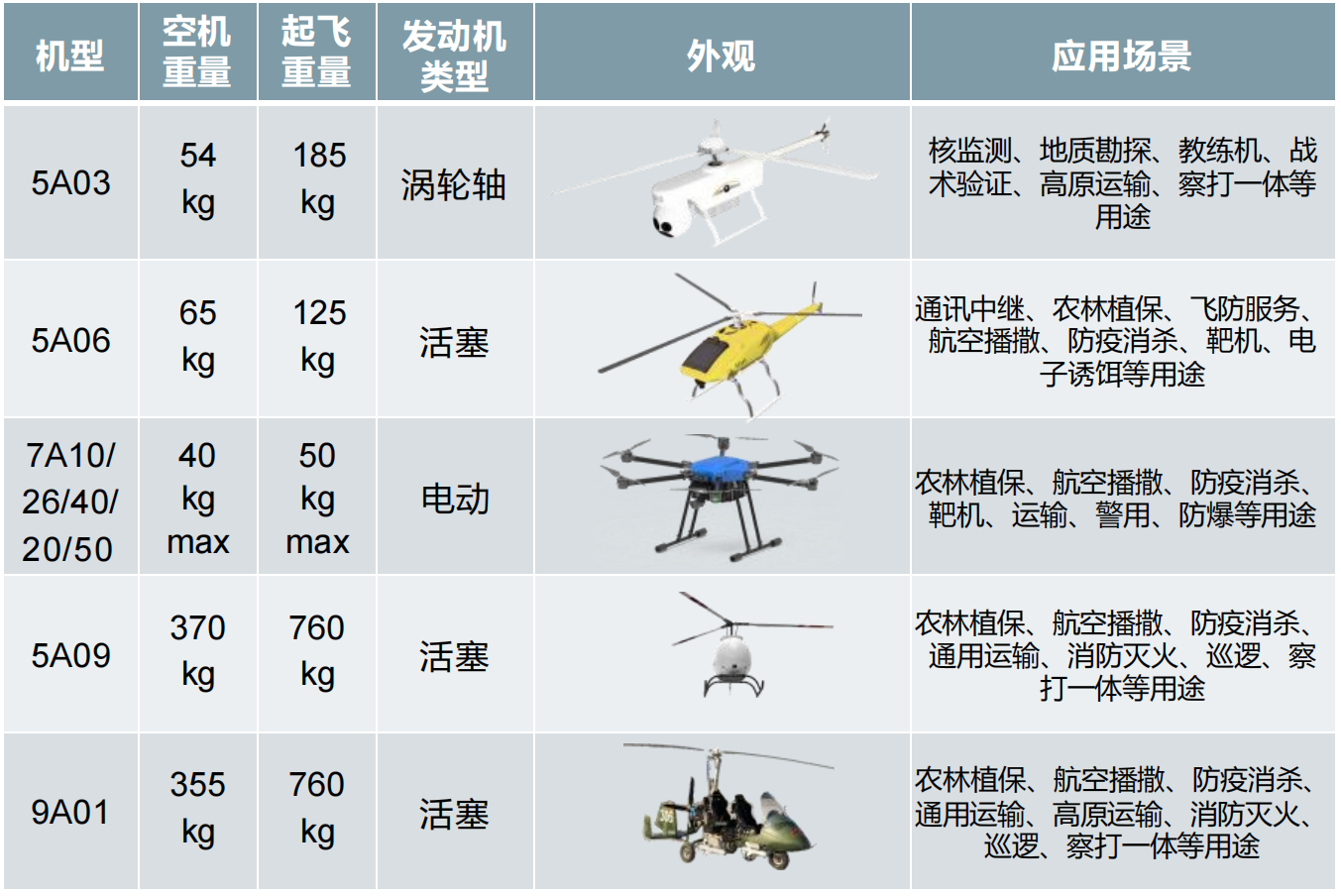
可根据客户需求定制各种无人机。
技术参数
内容 | 参数 |
机型 | BB4 |
机身结构 | 碳纤维复合材料 |
尺寸(折叠状态) | 820x575x395 mm(LxWxH) |
对称电机轴距 | 1570mm |
最大起飞重量 | 24.8kg |
最大载重 | 6kg |
悬停精度(无风或微风环境) | 垂直:±0.5 米(GNSS 正常工作时) |
±0.1米(RTK 定位正常工作时) | |
水平:±1.5 米(GNSS 正常工作时) | |
±0.1米(RTK 定位正常工作时) | |
RTK位置精度(在RTK FIX时) | 水平1cm+1ppm |
垂直1.5cm±1ppm | |
最大爬升速度 | 8 米/秒 |
最大下降速度(垂直) | 6 米/秒 |
最大水平飞行速度 | 20 米/秒 |
最大飞行海拔 | 普通桨:4500米 |
高原奖:7000米 | |
最长飞行时间 | 56min@1kg;50min@3kg |
抗风能力 | 12m/s(6级) |
GNSS | GPS+GLONASS+BeiDou+Galileo |
工作环境温度 | -20℃~50℃② |
存储环境温度 | -40°C~70°C |
支持载荷 | 华测自研激光扫描系统 |
整机易用设计 | 机体以及螺旋桨可快速折叠 |
任务响应时间 | 展开≤2min,撤收≤2min |
信号有效距离(无干扰、无遮挡) | 20km |
避障模块 | 前向臺米波雷达避障 |
障碍物感知范围 | 80 米 |
电池容量 | 27000mAh(12s) |
包装运输箱 | 三防航空箱、防水、防尘、防震 |
外包装箱尺寸 | 1000x700x500mm(LxWxH) |