The atmosphere of rotary wing unmanned aerial vehicles includes quadcopters, hexacopters, octrons, and multi rotors. The flight principle of multi rotor unmanned aerial vehicles mainly changes the lift of the rotor by adjusting the speed of the motor, thereby controlling the attitude and position of the aircraft.
A quadcopter drone is an aircraft with four propellers, typically in a cross shaped cross structure. The opposing propellers have the same direction of rotation, but are divided into two groups with opposite directions of rotation. This structure enables quadcopter drones to be controlled in six degrees of freedom, including translational and rotational actions along three coordinate axes. By adjusting the speed of each motor, precise control of the vertical, pitch, roll, and yaw movements of the aircraft can be achieved.
Vertical motion is achieved by simultaneously increasing or decreasing the output power of four motors to change the rotor speed, thereby adjusting the total lift and enabling the aircraft to ascend, descend, or maintain hover.
Pitch and roll movements generate unbalanced lift by changing the speed of a specific motor, causing the aircraft to rotate around a specific axis.
Yaw motion is achieved by adjusting the motor speed on the diagonal to generate unbalanced counter torque, causing the aircraft to rotate around the vertical axis.
This method of adjusting the speed of the motor to achieve various movements of the aircraft makes quadcopter drones highly flexible and stable, and widely used in various fields such as aerial photography, monitoring, and rescue.
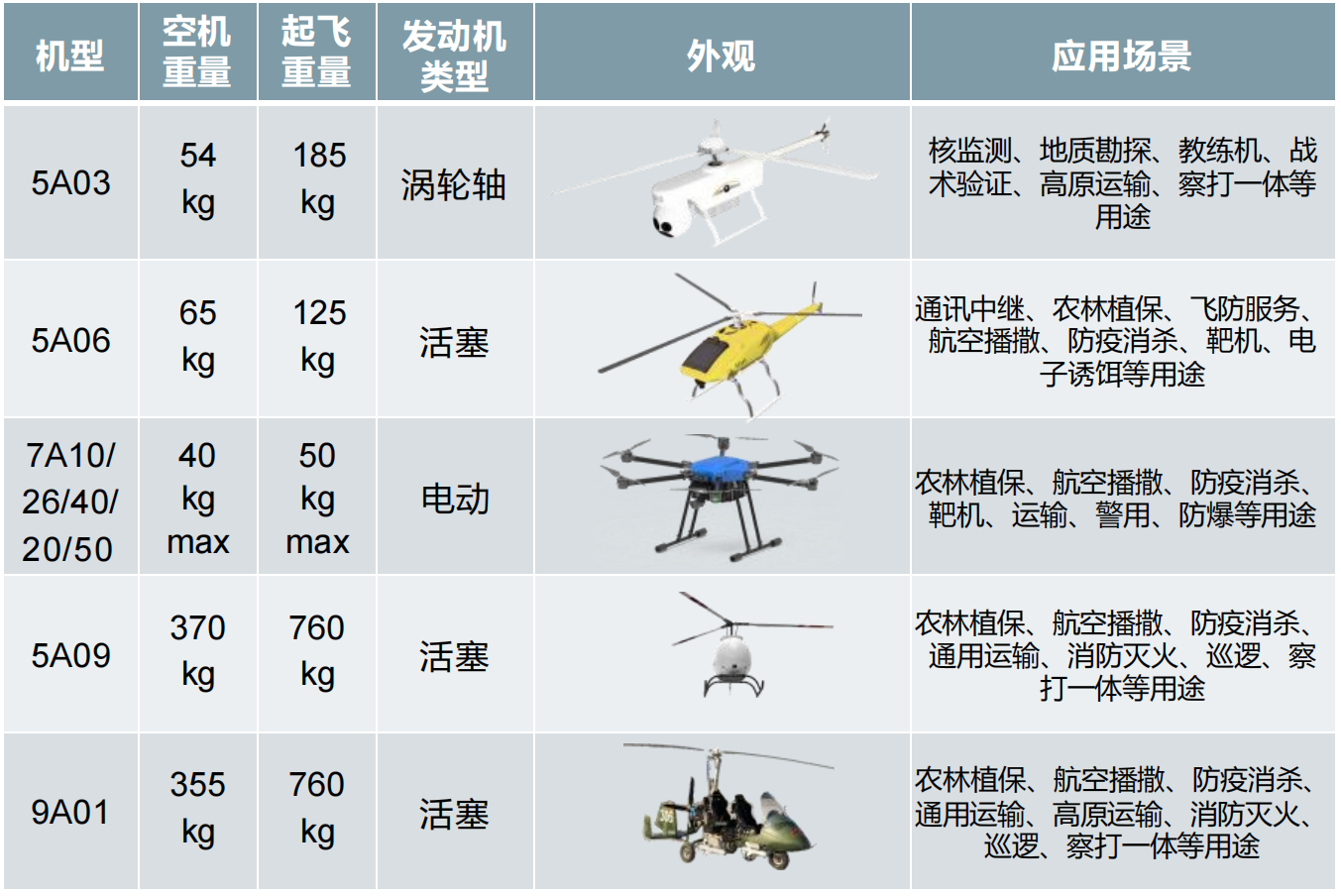
Various drones can be customized according to customer needs.

Technical parameters
Content | Parameters |
Body structure | Carbon fiber composite material |
Song typeface); Folding state) | 820x575x395 mm(LxWxH) |
Symmetrical motor wheelbase | 1570mm |
Maximum takeoff weight | 24.8kg |
Maximum load capacity | 6kg |
font family: Song typeface); No wind or light breeze environment) | Song typeface); During normal operation |
Song typeface); When the positioning is working normally) | |
Song typeface); During normal operation | |
Song typeface); When the positioning is working normally) | |
RTK font family: Song typeface); RTK FIX Song style; Time | font family: Song typeface; Level1cm+1ppm |
font family: Song typeface; Vertical1.5cm±1ppm | |
Song typeface; Maximum climb speed | 8Seconds |
Song typeface); Vertical | 6Seconds |
Maximum flight altitude | Meter |
Song typeface; Plateau Award: 7000 font size: 16px; font family: Song typeface; >Meter | |
<span style="font family: Song typeface; font-size: 16px; The longest flight time | 56min@1kg ; 50min@3kg |
Wind resistance capability | Song typeface; Level |
GNSS | GPS+GLONASS+BeiDou+Galileo |
Storage environment temperature | -40<span style="font size: 16px; font family: Song typeface; °C~70°C |
<Support load | Huace's self-developed laser scanning system |
Easy to use design of the whole machine | The body and propeller can be quickly folded |
Signal effective distance(No interference, no obstruction) | 20km |
Obstacle avoidance module | Forward facing millimeter wave radar obstacle avoidance |
Meter | |
Battery capacity | 27000mAh(12s) |
Packaging and transportation box | Three proof aviation case, waterproof, dustproof, and shockproof |